第 8 课:卷积神经网络
在计算机视觉中有一个问题,就是输入的数据可能会很大。
我们之前讲到的神经网络连接方式都叫做 “全连接”,而我们之前用的都是64 * 64 * 3 的小图片,所以还没什么问题
但是当图片尺寸比较大时,就很难处理,比如 1000 * 1000 * 3
因此我们需要使用 卷积计算
(一)卷积计算
计算机视觉最底层的原理是边缘检测, 这个我们在之前就已经讲到过
前面几层检测边缘,中间的层检测部分区域,后面的层检测完整物体
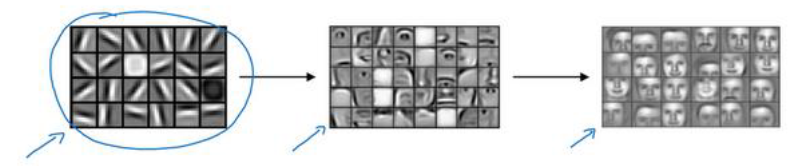
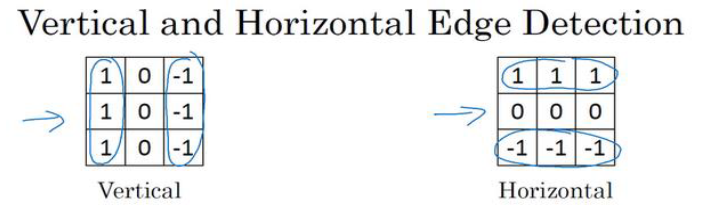
更细化一点,要分为垂直边缘和水平边缘
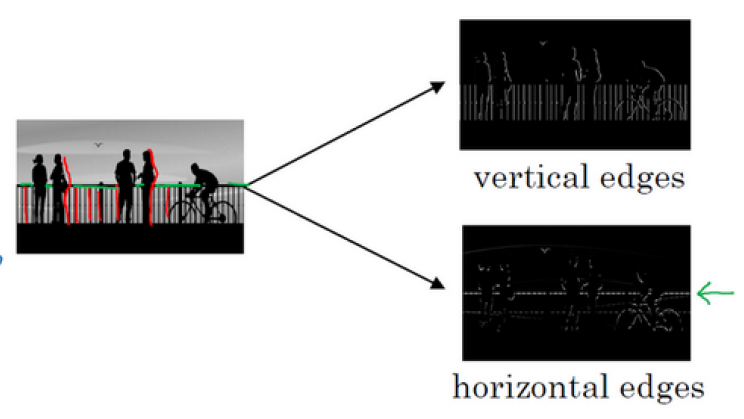
检测出这些边缘就需要用到 卷积运算
我们以垂直边缘检测为例,假设有一张 6 * 6 * 1 的灰度图像
我们需要像下面这样做卷积计算
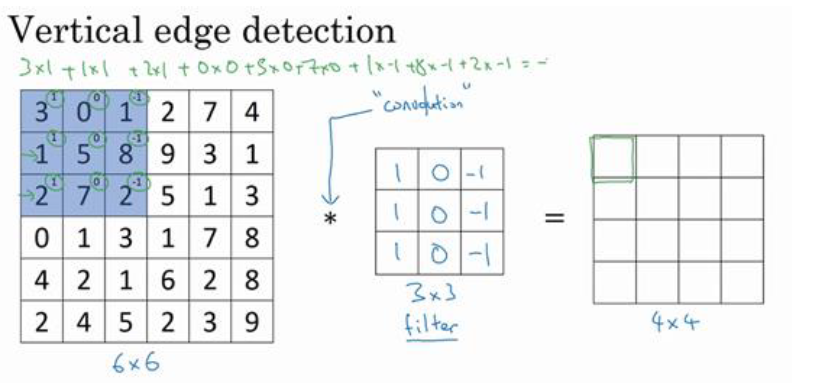
注意:
- 中间的星号是数学中的卷积运算符,而不是python中的元素乘法。
- 当前构造了一个3 * 3 的矩阵,被称为过滤器, 也有时被称为 核 (kernal)
- 在数学中进行卷积计算时,一般先把过滤器进行镜像对称,但是在神经网络中我们不这么做(其实我们现在的计算方法在数学中叫做互相关)
为什么这个可以做垂直边缘检测呢?让我们来看另外一个例子。
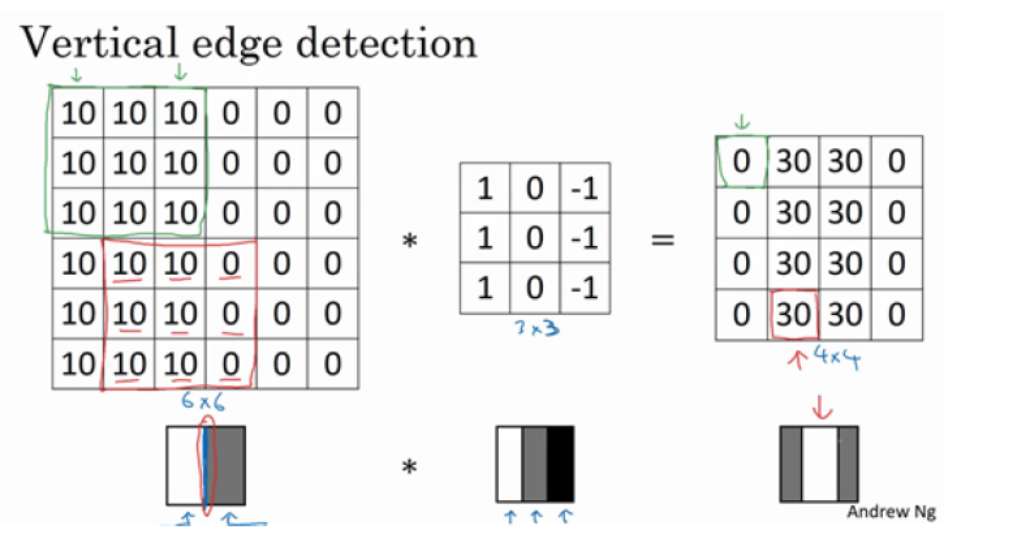
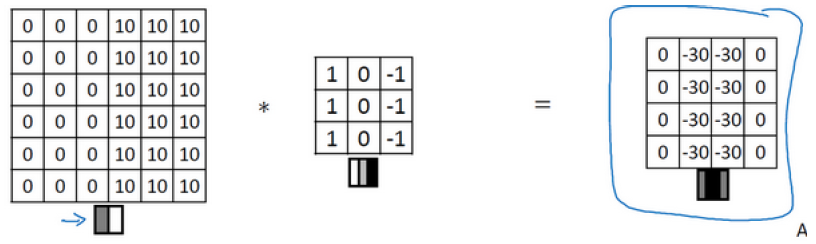
最后的图中有一个特别明显的垂直边缘线,目前之所以有点太宽了,是因为图片太小了。图片大了就正常了
如果不在乎中间是明线还是暗线,可以取绝对值
我们刚刚看了垂直边缘检测的过滤器,同理也可以知道水平边缘检测的过滤器
再看一个复杂一点的例子:
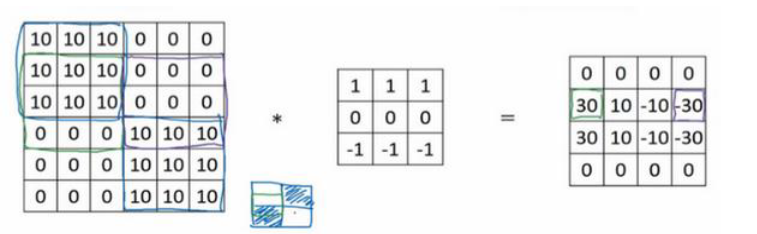
由于我们的图片尺寸太小,所以会有10和-10的过渡带,图片大一点就不会了
除了使用 1,0,-1 之外,其实还有一些数字选择
这些筛选器有时可以提升鲁棒性,
现在甚至可以把这9个数字设置为9个参数,并使用反向传播算法来更新他们
这种过滤器对于数据的捕捉能力甚至可以胜过任何之前这些手写 的过滤器。
相比这种单纯的垂直边缘和水平边缘,它可以检测出45°或 70°,甚至是任何角度的边缘
我们会在迟一点学到这种过滤器
(二)Padding
假设图像尺寸 n * n , 过滤器尺寸 f * f, 那么输出的维度就是 (n- f +1) * (n- f +1)
这里有2 个问题:
- 每次做卷积原图片都会变小
- 图像中间的像素点被卷积计算了好几次,但是图像边缘的像素点没有被计算那么多次 。所以可能导致边缘的特征没有被捕捉到
因此,解决办法是在卷积操作前填充图像,比如在 6 * 6 的外边包裹一层像素, 变成 8 * 8
再用 3 * 3 的过滤器来卷积,就仍然得到 6 * 6
习惯上,可以用0来填充
如果填充的层数是 p , 输出就变成了 (n- f +2p +1) * (n- f +2p +1)
刚刚我们提到的是 p=1 的情况,至于填充多少像素,通常有两个选择:
- Valid卷积: p=0, 不填充
- Same卷积: p=(f-1)/2 卷积后图片大小不变 (一般把 f 设置为奇数)
(三)卷积步长
(Strided Convolutions)
目前我们都是一次移动1格, 但是如果把 步长 s 设置为2, 过滤器一次会跳过两个格子
此时输出尺寸变为:
其中 是向下取整,
这意味着只在蓝框完全包括在图像或填充完的图像内部时,才对它进行运算。如果有任意一个蓝框移动到了外面,那就不要进行相乘操作。
(四)三维卷积
我们刚刚讲的都是灰度图像,那么对于RGB图像 比如 6 * 6 * 3, 该如何卷积呢?
你可以把它想象成 3 张 6 * 6 的图像的堆叠。现在我们不是把它和原来的 3 * 3 的过滤器做卷积,而是一个 3 * 3 * 3 的三维过滤器
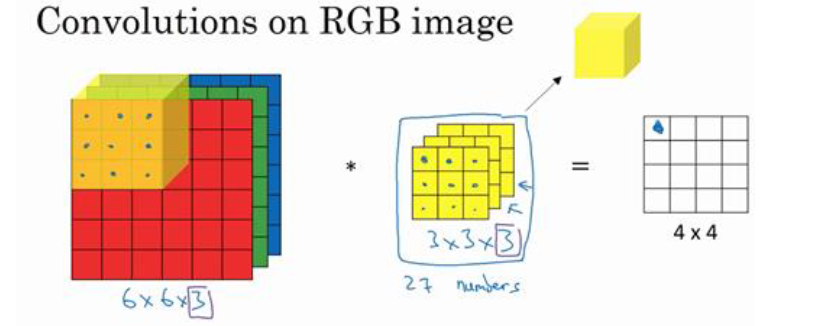
现在第一个6代表图像宽度,第二个6代表图像宽度,3 代表通道数目。图像的通道数必须和过滤器的通道数匹配
如果指向检测红色通道的边缘,可以将第一个过滤器设置为:
剩下的绿色通道和蓝色通道的过滤器都设置为0
那么这个就是一个检测垂直边界的过滤器,但是只对红色通道有用
或者如果你不关心垂直边界在哪个颜色通道里,那就把 绿色通道和蓝色通道的过滤器 都设置成和 红色通道 一样就好了
如果不仅仅想要检测垂直边缘,而是要同时检测垂直边缘和水平边缘,甚至还有 45°倾斜的边缘,那么可以使用多个过滤器
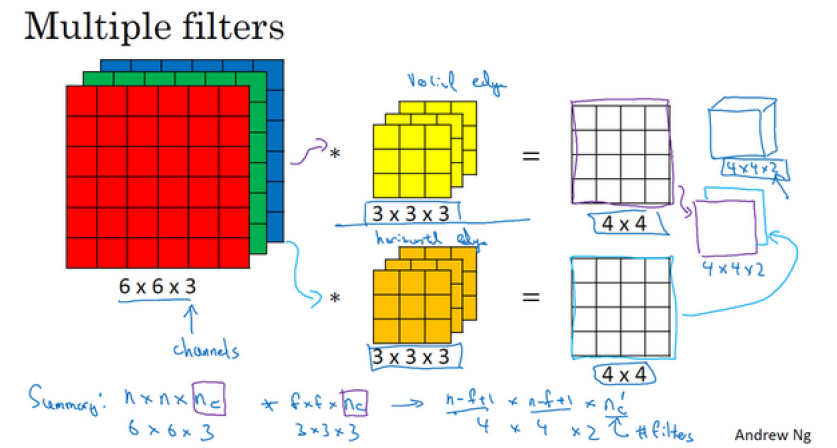
把两个输出按顺序堆叠,就得到了一个 4 * 4 * 2 的输出立方体, 这里的 2 来自于使用了几个不同的过滤器
总结一下, 如果输入图像为 ,其中 是通道数目
然后卷积上 个 的过滤器,最后得到的输出就是:
是过滤器的个数,也是下一层的通道数
(五)池化层
(Pooling Layers)
除了卷积层之外,池化层也可以减小图片的大小,提高计算速度,同时提高所提取特征的鲁棒性
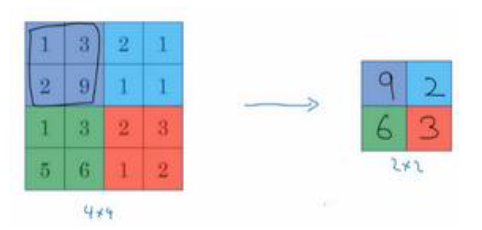
我们一般采用的池化方法是 最大池化(Max pooling) , 也就是取一个特定区域内的��最大值
在下图中我们使用了 2 * 2 区域, 步长为 2 。 即 f=2 , s =2
之前讲的计算卷积层输出大小的公式同样适用于最大池化,即:
如果输入是三维的,输出也是三维的,通道数不变,宽高公式如上
池化层的原理:数字大意味着可能探测到了某些特定的特征。它会保留在最大化的池化输出里。
注意:
- 池化层有一组超参数,但并没有参数需要学习。一旦确定了 𝑓和 𝑠,它就是一个固定运算,梯度下降无需改变任何值。
因此有时候池化层不被作为一个层,或者和一个卷积层一起作为一个层 - 还有一种池化叫平均池化,不太常用
- 大部分情况下,最大池化很少用padding
(六)卷积神经网络
我们先来看单层卷积神经网络
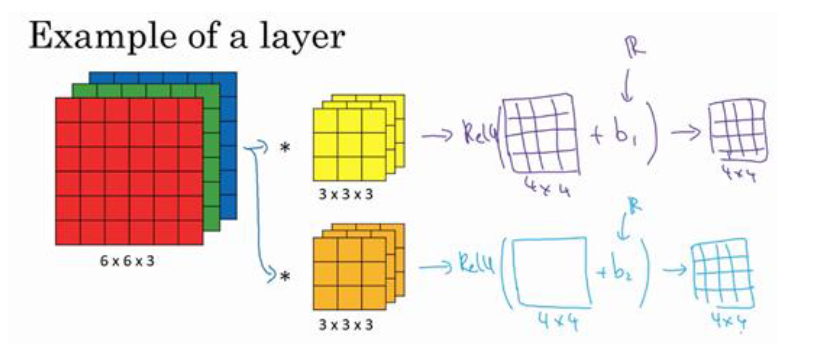
我们之前讲过:
这里的过滤器都可以用 来表示,激活函数可以使用 Relu
记得在激活函数前还有加上偏差b,用python广播机制实现
注意,无论输入的图片有多大,需要更新的参数都是取决于过滤器,即
就是过滤器的数量,也是提取的特征数
总结一下尺寸:
输入尺寸:
输出尺寸:
筛选器尺寸:
Weights(多个筛选器):
偏差bias:
:
其中 :
现在我们已经知道了如何为卷积神经网络构建一个卷积层,那如何构建一个深度卷积神经网络呢?
如下图所示,假设要识别输入的 39 * 39 * 3 的图像里有�没有猫,每一层都使用了 valid卷积,也就是padding为0
第一层用了 10 个过滤器,第二层用了 20个过滤器,第三层用了 40 个过滤器
具体参数见图中
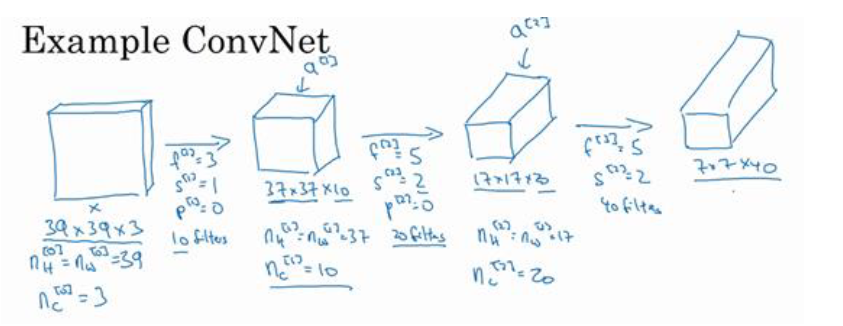
到此这张39 * 39 * 3 的图像处理完毕了,最后提取了 7 * 7 * 40 个特征
然后对该卷积进行处理,可以将其平滑或展开成 1960个单元,输出为一个向量,
其填充内容是logistic回归单元还是 softmax回归单元取决于我们是想识图片上有没有猫,还是想识别 𝐾 种不同类型中的一个
举个例子:假设要分为10种类型,那应该怎么处理最后一个卷积层 7 * 7 * 40 的输出?
- 将最后一个卷积层的输出,即 7 * 7 * 40 的三维特征图(feature map),展开 成一个一维的长为1960的向量。
- 在
Softmax层, 将 1960 * 1 的矩阵 使用一个全连接层 转化成 10 * 1 的向量。 W的尺寸是 10 * 1960,
- 在
Softmax层,对于每个类别 k,你将计算该类别的得分的指数与所有类别得分的指数和的比例。公式如下:
注意:
- 随着神经网络加深。图片宽高应该变小,通道数应该变大
- 一个典型的神经网络通常有 3 层, 。
- 卷积层用CONV 来表示, 池化层用 POOL 来表示, 全连接层用FC 表示
现在我们要往卷积神经网络中��加入池化层,该如何实现呢?
下面给出了一个例子,用于识别手写数字是 1 - 9,参考的参数来源是LeNet-5模型,但这里并不是LeNet-5模型
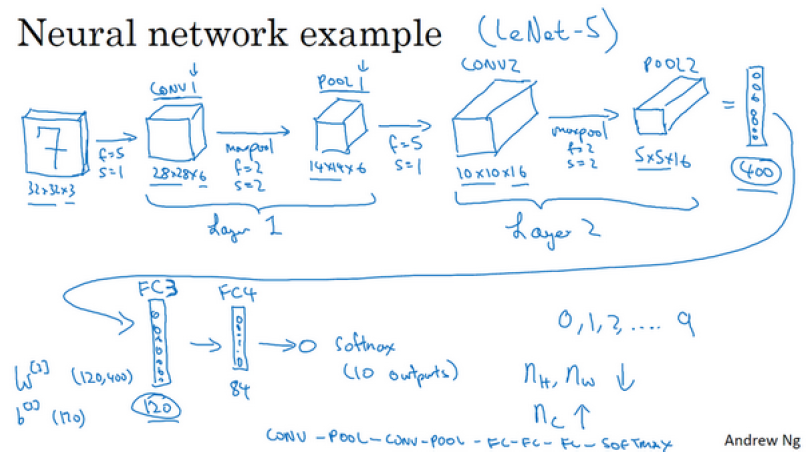
关于这个模型,我们有几点需要注意:
- 第一层的过滤器 f =5, stride=1, 使用了6个过滤器,padding=0, 使用了ReLU函数,其它层类似如图
- 由于池化层没有需要更新的参数,所以把一个池化层和一个卷积层合起来作为一个层
- 全连接层 FC3 就是普通的神经网络,权重W尺寸为 120 * 400
- 随着神经网络的深度不断加深,高度 和 宽度 通常会减少,通道数量会增加
- 在神经网络中,另一种常见模式就是一个或多个卷积后面跟随一个池化层,然后再是一个或多个卷积层后面再跟一个池化层,然后是几个全连接层,最后是一个 softmax。
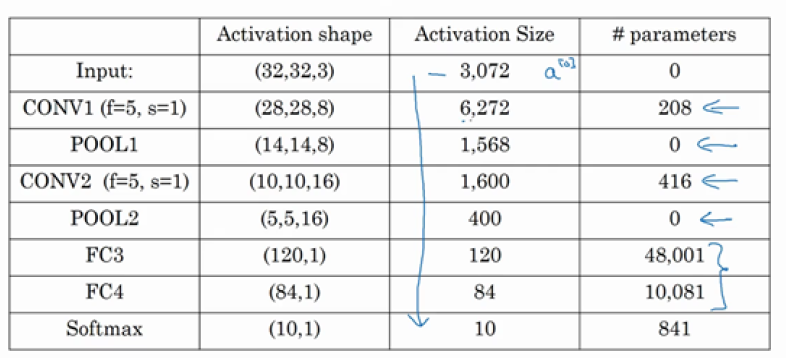
- 参数的大小如下图,可以看见大部分参数在全连接层:
代码实现
典型 CNN 代码示例(手写数字识别 10 类)
结构总结
| 层次 | 操作 | 输出 shape |
|---|---|---|
| 输入 | 32x32x1 | |
| Conv1 | 5x5, 6 filters | 28x28x6 |
| Pool1 | 2x2 | 14x14x6 |
| Conv2 | 5x5, 16 filters | 10x10x16 |
| Pool2 | 2x2 | 5x5x16 |
| Conv3 | 5x5, 120 filters | 1x1x120 |
| Flatten | - | 120 |
| FC1 | 120 → 84 | 84 |
| FC2 | 84 → 10 | 10(softmax logits) |
随着卷积层加深:
- 图像宽高 越来越小(下采样 Pooling)
- 通道数(feature map) 越来越多
- 最后拉平 → 全连接 → softmax 分类
import torch
import torch.nn as nn
import torch.nn.functional as F
class SimpleCNN(nn.Module):
def __init__(self, num_classes=10): # 10 类分类
super(SimpleCNN, self).__init__()
# 第1层: 卷积 + ReLU + 池化
self.conv1 = nn.Conv2d(in_channels=1, out_channels=6, kernel_size=5, stride=1, padding=0)
self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2)
# 第2层: 卷积 + ReLU + 池化
self.conv2 = nn.Conv2d(in_channels=6, out_channels=16, kernel_size=5, stride=1, padding=0)
self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2)
# 第3层: 卷积 + ReLU
self.conv3 = nn.Conv2d(in_channels=16, out_channels=120, kernel_size=5, stride=1, padding=0)
# 全连接层
self.fc1 = nn.Linear(120, 84)
self.fc2 = nn.Linear(84, num_classes) # 输出 num_classes 维
def forward(self, x):
# 输入 x: (batch_size, 1, 32, 32) 假设输入是 32x32 灰度图
x = self.conv1(x) # (batch_size, 6, 28, 28)
x = F.relu(x)
x = self.pool1(x) # (batch_size, 6, 14, 14)
x = self.conv2(x) # (batch_size, 16, 10, 10)
x = F.relu(x)
x = self.pool2(x) # (batch_size, 16, 5, 5)
x = self.conv3(x) # (batch_size, 120, 1, 1)
x = F.relu(x)
# 展平为 (batch_size, 120)
x = x.view(-1, 120)
x = self.fc1(x) # (batch_size, 84)
x = F.relu(x)
x = self.fc2(x) # (batch_size, num_classes)
return x
训练时配的 loss
model = SimpleCNN(num_classes=10).to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
criterion = nn.CrossEntropyLoss()
训练循环
for epoch in range(num_epochs):
model.train()
for images, labels in train_loader:
images = images.to(device)
labels = labels.to(device)
outputs = model(images)
loss = criterion(outputs, labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
(七)经典的神经网络
(1)LeNet-5 网络
LeNet-5 是 针对灰度图片训练的,所以图片的大小只有 32×32×1, 用于识别手写数字
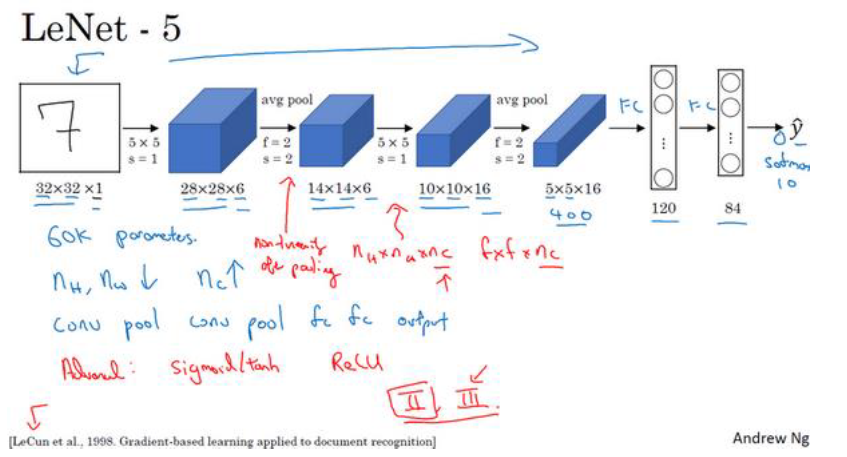
注意:
- 在这篇论文写成的那个年代,人们更喜欢使用平均池化,而现在我们可能用最大池化更多一些。
- 这个神经网络中还有一种模式至今仍然经常用到,就是一个或多个卷积层后面跟着一个池化层,然后又是若干个卷积层再接一个池化层,然后是全连接层,最后是
Softmax和输出
(2)AlexNet 网络
AlexNet 首先用一张 227×227×3的图片作为输入,实际上原文中使用的图像是 224×224×3
但是如果你尝试去推导一下,你会发现 227×227这个尺寸更好一些。
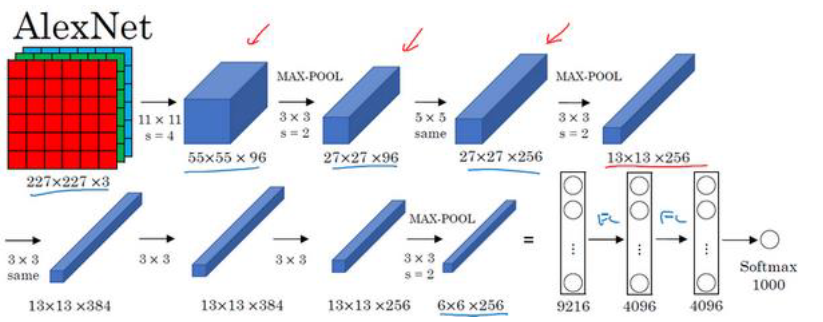
注意:
- 实际上,这种神经网络与
LeNet有很多相似之处,不过AlexNet要大得多。 LeNet-5大约有 6万个参数,而 AlexNet包含约 6000万个参数。 AlexNet�比LeNet表现更为出色的另一个原因是它使用了ReLu激活函数。- 第一点,在写这篇论文的时候, GPU的处理速度还比较慢,所以 AlexNet采用了非常复杂的方法在两个 GPU上进行训练。大致原理是,这些层分别拆分到两个不同的GPU上,同时还专门有一个方法用于两个 GPU进行交流。
- 论文还提到,经典的
AlexNet结构还有另 一种类型的层,叫作 “局部响应归一化层”,即 LRN层,这类层应用得并不多
(3)VGG-16
VGG-16网络没有那么多超参数,这是一种只需要专注于构建卷积层的简单网络。
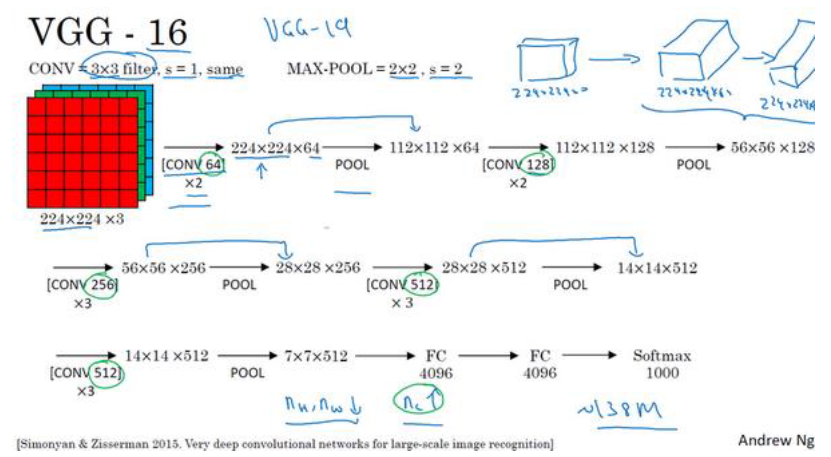
注意:
- 这里采用的都是大小为 3×3 步幅为 1的过滤器,并且都是采用 same卷积
- VGG-16的这个数字 16,就是指在这个网络中包含 16个卷积层和全连接层。共包含约 1.38亿个参数,即便以现在的标准来看都算是非常大
(八) 1×1 卷积
当卷积层的过滤器尺寸为1 * 1 时,另有妙用
如果某一层的图片输出已经是 6 * 6 * 32 ,对他进行 1 * 1 卷积所实现的功能就是遍历这 36 个单元格,
计算每个单元格的32个数字之和,然后使用ReLU激活
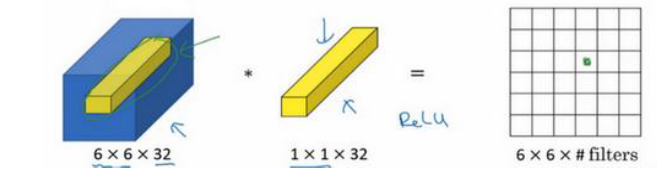
这种方法通常 称为 1×1卷�积,有时也被称为 Network in Network
这个方法可以在不改变宽高的情况下,用于压缩通道数 或者 自由地控制通道数
而相反池化层则是压缩宽高,不改变通道数