第 6 课:超参数调试,Batch正则化,Softmax回归
(一)如何选择最合适的超参数
我们已经知道很多的超参数了,但是这些超参数的重要性是不同的。
优先级大到小排列如下:
- 学习率
- 动量梯度下降算法的 , 隐藏层单元,mini-batch size
- 层数,学习率衰减率 > Adam 算法的
那如何测试出最好的超参数呢?
对于一组超参数而言,如下图所示,当我们测试的次数有限时,建议采用右边的取点方法。
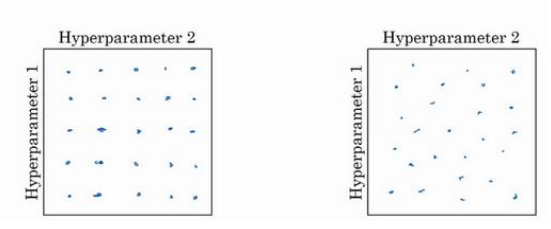
因为左图中每个参数只采用了5个值,而右图中每个参数尝试了25个值,所以可以更好地观察哪个参数更重要
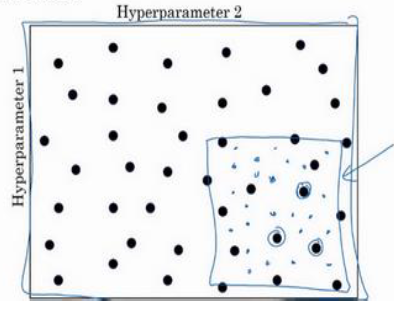
拓展到3个参数的组合尝试中也是如此
在所有的采样点中测试出最好的之后,可以选择进一步精细化测试
此外,对于单个参数在一定范围内的取点测试,不建议均匀分布随机取点
举个例子,如果某个参数要从50试到100,那么我们可以均匀取样
但是如果某个参数要从0.0001 试到 1, 那么最好像 0.0001, 0.001 ,0.01, 0.1, 1 这样取样(但仍需是随机取样)
在python中可以这样实现:
r = -4* np.random.rand() # r 属于[-4,0]
a = 10**r # a 属于[10-4,1]
那么对于像 这样的0.9 到0.999之间取样的该如何实现呢?
r = -2* np.random.rand()-1 # r 属于[-3,-1]
beta = 1-10**r # beta 属于[0.999,0.9]
为什么要这样取点呢?因为在深度学习中,很多时候在某个范围内参数的影响力会突然变大很多
比如在 靠近1时,所代表的平均天数 1/(1-) 会变大得非常迅速,所以要在这个范围内尝试更多的点
然而,我们上面讨论的都是给定参数后,完整地测试一次之后对各组的测试结果进行比较
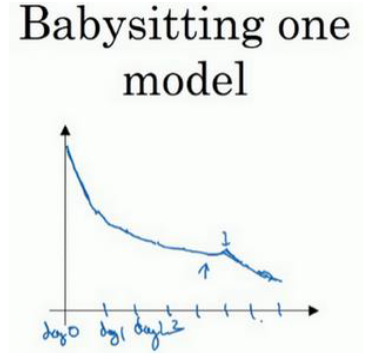
但是如果进行一次实验的成本非常高,时间非常长,我们只能做一两次实验,该怎么确定最优参数呢?
如下图,我们可以采用这种 Babysitting one Model
也就是在指定的时间间隔内调整一次参数,观察输出的成本函数的变化
(二)Batch归一化
(Batch Normalizing)
我们之前讲过归一化输入来把原始数据X 的均值降到 0, 方差缩放到1·:
其中 是特征的均值, 是特征的标准差。
我们知道这种方法把扁平的数据拉伸得饱满,可以加快学习过程
那么同理可得,既然可以把输入样本 X 进行归一化,是不是可以把每一层的输出 a 都归一化呢?
事实上这是可以的,但是我们一般归一化的是 而不是 , 归一化可以使下一层的 w 和 b 训练得更快
假设第 l 层有 m 个隐藏节点,其中 是特征的均值, 是特征的标准差。
注: 用于防止分母为0
现在的每个隐藏单元都含有平均值0和方差1,但是也许隐藏单元有了不同的分布会有意义,所以我们手动修改其平均值和方差
这样我们就可以随意修改 的平均值
在神经网络中,我们不再使用 , 而是
注意:
-
在过程中我们引入了新的参数 ,这对于每层是不一样的
-
这里的 和 指数加权平均数(比如Adam算法等)中的 不是一个东西,这里的是用于正则化控制平均值的
-
并不是超参数!这是需要更新的参数,和W跟b一样!
我们可以使用任意的优化算法,可以是Adam、RMSprop、Momemtum, 或者只是普通的梯度下降
然后更新参数,例如: -
实践中,Batch归一化通常和 mini-batch一起使用,每一个mini-batch 中的计算方法都和上面相同
-
事实上,由于在Batch归一化的过程中首先把平均值拉到了0,所以实际上 被约掉了。可以暂时把它设置为0
-
的维数是
的维数是
的维数是
的维数是
Batch 归一化的优点:
除了我们之前说过的,归一化可以把扁平的数据变得饱满从而加速计算之外,Batch归一化还有其他优点:
-
减轻 internal covariate shift(减少层之间耦合)
稳定每层的输入,权重更新不再依赖于前一层特定的权重分布,因此,每一层都可以在相对独立的环境中学习和适应。
-
提高深层网络训练稳定性 确保每层的输入保持相同的分布,它减少了层与层之间参数更新的相互依赖性。
这意味着即使前面层的参数发生了变化,也不会极大地影响到后面层的学习进程。 -
加速收敛
这种特性使得每一层都能在更加独立的环境中进行学习,降低了层间复杂的相互作用,有助于网络更快地收敛。 -
对于输入分布变化更鲁棒
即使训练数据在某些方面不够代表性(如只有黑猫),Batch归一化也有助于模型在面对不同类型(如有色猫)的数据时,保持稳定的性能。因为Batch归一化减少了模型对输入数据具体特征的敏感度,使得模型对于输入数据中的细微变化更加鲁棒。
-
有�轻微正则化效果(类似 Dropout)
在每个
mini-batch中计算均值和方差,而不是在整个数据集上,用一小部分的数据计算导致了每个隐藏层上都有噪音
和dropout类似,这样迫使后部单元不过分依赖任何一个隐藏单元,但是效果比较轻微
因此单个mini-bacth越大,Batch归一化的正则化效果越弱
Batch 归一化的缺点
- 训练时必须用 minibatch,batch_size 太小时效果差
- 对 RNN 不适用(变长序列不方便 BN,RNN 更常用 LayerNorm)
- 小 batch_size 时估计均值方差不准,导致训练不稳定
- 推理时需要保存 moving average 均值、方差
Batch 归一化的测试过程
我们现在已经知道了如何在训练过程中使用Batch归一化,但是放到测试时,该怎么做呢?
我们现在对于单个mini-batch中的某个隐藏层的计算方法如下,其中 m 是这个mini-batch中的样本数量,而不是整个训练集
但是问题是,在测试时,我们是逐个测试样本的,而不是把一个 mini-batch 中的所有样本同时处理
而单个样本的 没有意义,因此需要单独估算 , 这可以使用指数加权平均数来实现
对不同的mini-batch 的第l层训练时,我们得到了
然后对这些值进行指数加权平均就可以得到最后测试集所需要的 了, 也是同理
最后在测试时,也要进行对应的batch归一化,用的就是测试集的 Z 和 用指数加权平均数 估算出来的 和
但是在使用 Pytorch 过程中,并没有这个问题
代码实现
Batch Normalization(BN) 属于 步骤 3:模型��结构(Model/Network)
- 对 全连接层,用
nn.BatchNorm1d - 对 卷积层,用
nn.BatchNorm2d
import torch.nn as nn
class MLP(nn.Module):
def __init__(self):
super(MLP, self).__init__()
self.fc1 = nn.Linear(784, 256)
self.bn1 = nn.BatchNorm1d(256) # BatchNorm
self.relu1 = nn.ReLU()
self.fc2 = nn.Linear(256, 128)
self.bn2 = nn.BatchNorm1d(128)
self.relu2 = nn.ReLU()
self.fc3 = nn.Linear(128, 1)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
x = self.fc1(x)
x = self.bn1(x)
x = self.relu1(x)
x = self.fc2(x)
x = self.bn2(x)
x = self.relu2(x)
x = self.fc3(x)
x = self.sigmoid(x)
return x
卷积神经网络 CNN 示例
nn.Conv2d(in_channels, out_channels, kernel_size)
nn.BatchNorm2d(out_channels)
(三)Softmax回归
我们之前学的都是二分类,但是如果要实现多分类,就要用到 Softmax 回归层,使得最后输出的结果是一个数组。
假设我们要识别猫、狗和鸡, 那么这个输出数组可以是 [ 0.1 , 0.5 , 0.4 ] ,这样显而易见狗的概率最大。
同时要确保数组中的所有概率之和为 1
之所以叫
Softmax, 是因为形如 [0, 1, 0] 这样的只有一个1的全零数组叫Hardmax
我们用 C 来表示类别个数,Softmax 层的计算方法如下:
注意:
Z 应该是一个 4 * 1 的数组
我们可以把上面的第二步当做 Softmax 的激活函数
这一激活函数的特殊之处在于,这个激活函数 𝑔 需要输入一个 4×1维向量,然后输出一个 4×1维向量
而之前,我们的激活函数都是接受单行数值输入,例如 Sigmoid 和 ReLu 激活函数,输入一个 实数,输出一个实数。
在图像上,可以这么理解
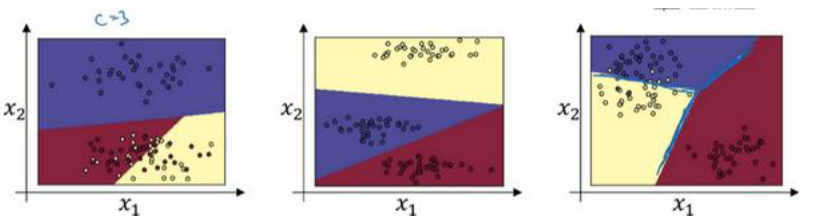
我们可以发现,任何两个分类之间的决策边界都是线性的
注意:
Softmax通常被用作神经网络的最后一层。
它的作用是将网络的原始输出,即logits转换成概率分布,这有助于直接从输出层解读每个类别的预测概率- 如何知道输出数组中的每个值代表哪个类别?
在训练神经网络时,你需要预先定义类别的顺序,并在整个模型训练和预测过程中保持这一顺序不变。
Softmax的损失函数
由于现在最后 的输出不是单个值,而是一个数组,所以损失函数也要重新定义
在 Softmax 分类中,一般用的损失函数是:
举个例子:
在这种情况下,想要让损失函数尽可能小,就必须让 尽可能大,也就是尽可能准确
上面是单个样本的损失函数,整个训练集的成本函数定义如下:
关于向量化时的数据尺寸如下
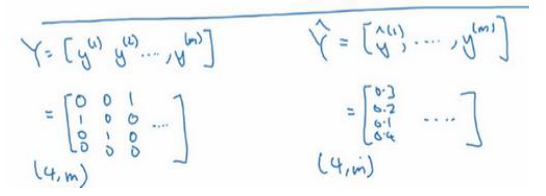
如果 C=4,那么 都是 4 × 1 的向量, 而 Y 最终是一个 4 * m 的矩阵,同样的 也是一个 4 * m 的矩阵
最后我们来看一下,在有 Softmax 输出层时如何实现梯度下降法:
输出层的尺寸是 C * 1
计算方法如下:
现在看起来 Softmax 可能有点抽象,但是我们会在下面的卷积神经网络中用具体的图像识别例子来理解
代码实现
Softmax 属于 步骤 3:模型结构(Model/Network)
Softmax是 激活函数,属于模型最后一层的设计- 用来 把 logits(未归一化分数)转成概率分布
- 多分类问题通常使用
Softmax作为输出层 - 损失函数搭配用
CrossEntropyLoss(自动包含 Softmax + log)
直接写 Softmax + NLLLoss
import torch.nn as nn
model = nn.Sequential(
nn.Linear(784, 128),
nn.ReLU(),
nn.Linear(128, 4), # C=4 类别
nn.Softmax(dim=1) # Softmax 激活
)
criterion = nn.NLLLoss()
更常用写法 → 不用 Softmax,直接用 CrossEntropyLoss
CrossEntropyLoss=log(Softmax)+NLLLoss
model = nn.Sequential(
nn.Linear(784, 128),
nn.ReLU(),
nn.Linear(128, 4) # 输出 logits,不加 Softmax
)
criterion = nn.CrossEntropyLoss()
训练时:
outputs = model(images) # shape: (batch_size, 4)
loss = criterion(outputs, labels) # labels = (batch_size), 值为 0~3
完整示例
import torch.nn as nn
class MLP(nn.Module):
def __init__(self, num_classes=4):
super(MLP, self).__init__()
self.fc1 = nn.Linear(784, 128)
self.relu = nn.ReLU()
self.fc2 = nn.Linear(128, num_classes) # 输出 logits,C 类别
def forward(self, x):
x = self.fc1(x)
x = self.relu(x)
x = self.fc2(x) # logits
return x
model = MLP(num_classes=4)
criterion = nn.CrossEntropyLoss()