第 5 课:算法的优化
(一)Mini-batch 梯度下降
(Mini-batch gradient descent)
mini-batch 算法的过程
我们之前尝试过,对于大量的训练数据,进行一次梯度下降的时间非常长。
。 维度
。 维度
现在把 X 分为很多个小集合,称为mini-batch。
比如把 作为一个mini-batch, 称为 ,
那么如果 ,则就可以拆分为 到
同理,如果 ,则就可以拆分为 到
所以 的大小为 , 的大小为 ,其中 n 为单个 mini-batch 的样本数
使用小括号上标表示第几个训练样本, 中括号上标表示第几层,大括号上标表示第几个 mini-batch
之前我们有
现在对于每一个mini-batch就会改为
对应的成本函数改为
其中:
- m是单个minibatch中的样本数
- 是一个mini-batch 中的样本
如果使用正则化,则
反向传播也是同理。
我们可以发现对于单个mini-batch,计算步骤和之前普通的batch梯度下降算法是完全相同的。
对于每一个 mini-batch , 都要进行一轮完整的正向和反向传播,计算损失函数,并且更新权重
所以使用batch梯度下降算法一次只能梯度下降一次,但是使用mini-batch梯度下降算法每个mini-batch都可以梯度下降一次
同时,一次遍历所有mini-batch,也就是遍历整个X,称为一个 迭代(epoch)
样本小于2000个时,不使用mini-batch,
样本数量较大时,把一个 mini-batch 的大小设置为64、128、256 或 512 (2的指数)
mini-batch 算法的原理
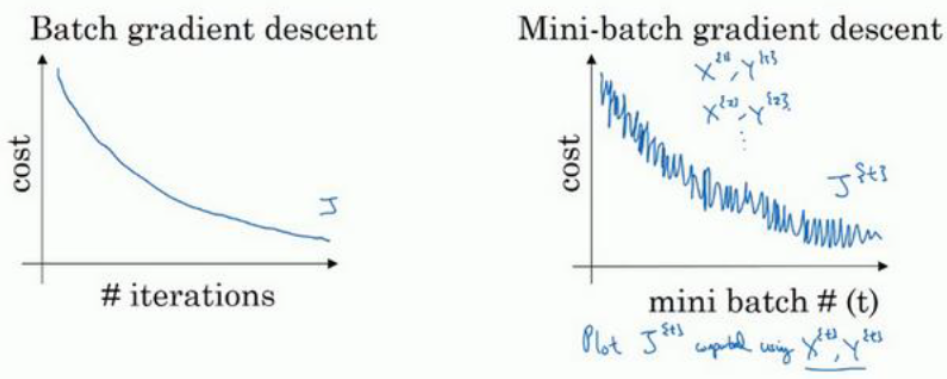
在使用batch算法时,成本函数应该是单调递减的,除非学习率过大
但是对于 mini-batch 而言,应该如下图,因为每次下降用的都是不同的训练集
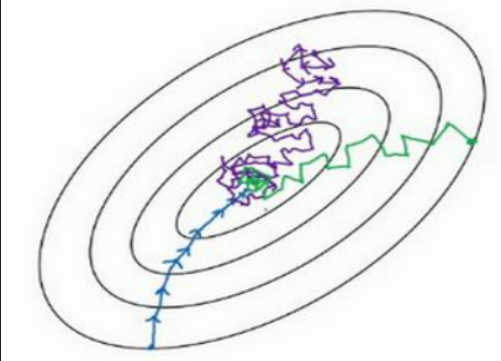
而更形象地表现如下
其中:
-
蓝线是batch梯度下降算法,也就是把一个mini-batch 的大小设置为 m
-
紫线是随机梯度下降算法(SGD),也就是把一个mini-batch 的大小设置为 1
-
绿线是mini-batch梯度下降算法,也就是把一个mini-batch 的大小设置为 1000
这种算法仍然存在如下弊端:
- 折线摆动靠近最优解,太慢
- 学习率不能太大,不然不能在最优解附近收敛
代码实现
我们继续按照 PyTorch 五大步骤 定位:minibatch 属于:步骤 2:数据加载与预处理(DataLoader)
- minibatch 本质上是“如何把大数据集切分成小块”
- PyTorch 用
torch.utils.data.DataLoader实现自动 batch 切分
from torch.utils.data import DataLoader
train_loader = DataLoader(train_dataset, batch_size=128, shuffle=True, num_workers=4)
test_loader = DataLoader(val_dataset, batch_size=128, shuffle=False, num_workers=4)
| 参数 | 含义 |
|---|---|
batch_size | minibatch 大小(常用 64、128、256、512) |
shuffle | 每个 epoch 是否打乱样本顺序(训练集要 shuffle) |
num_workers | 多进程读取数据,加快 IO |
在训练循环中体现
for images, labels in train_loader:
# 每次循环是一个 minibatch
# images.shape → (batch_size, ...)
# labels.shape → (batch_size, ...)
outputs = model(images)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
(二)动量梯度下降算法
(Gradient descent with Momentum)
在了解这种算法之前,我们需要先学习一下指数加权平均数
(1)指数加权平均数
(Exponentially weighted averages)
这是一种便捷地得到动态拟合曲线的方法
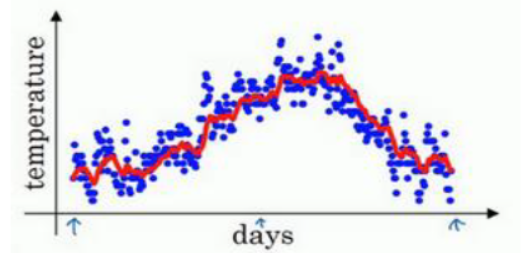
其中: 是某一天的加权平均数, 是某一天的值
就可以得到关于 和 t 的关系图
公式如下:
显而易见, 越趋近于1, 曲线越平缓,对于变化适应的更慢
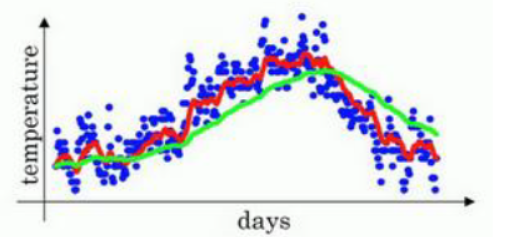
由于一开始 , 所以曲线一开始应该是从0开始的,因此前几天的值拟合的不好
所以可以选择使用 指数加权平均的偏差修正 (Bias correction in exponentially weighted averages)
公式修改成如下:
- 在实际代码中,一般不把 之类变量分开,而是不断地更新v
v=beta*v+(1-beta)*theta - 偏差修正不是必须的,因为除了开头的几个样本,后面的几乎没有区别。甚至一般不怎么用
- 动量梯度下降算法其实跟动量没有关系,使用动量Momentum只是一种比喻。
其实用惯性更好理解。动量大的物体更难以轻易改变运动状态,对应到算法中就是更平滑,更难以产生摆动
(2)动量梯度下降算法
无论是batch梯度下降 还是mini-batch梯度下降 ,在每次反向传播的时候都需要计算 ,并且用他们来更新
但是这个算法不直接使用 , 而是使用他们的 指数加权平均数 来更新
也就是:
原理解释
我们在之前就讲到了minibatch的缺点在于摆动 ,取加权平均数可以可以有效减小摆动
- 一般默认设置为0.9
- 初始设置应为 和 形状相同的零矩阵, 初始设置应为 和 形状相同的零矩阵
(3)代码实现
动量梯度下降算法 属于 步骤 4:训练过程(Training Loop),优化器(Optimizer)
PyTorch 已经自带 SGD + Momentum:
optimizer = torch.optim.SGD(model.parameters(), lr=0.01, momentum=0.9)
| 参数 | 含义 |
|---|---|
lr | 学习率 α |
momentum | 动量系数 β,通常 0.9 |
weight_decay | L2 正则化,可选 |
for epoch in range(num_epochs):
model.train() # 切换到训练模式,启用 Dropout,启用 BatchNorm 的训练状态
for images, labels in train_loader: # 每次循环处理一个 minibatch
outputs = model(images) # 前向传播
loss = criterion(outputs, labels)
optimizer.zero_grad() # 梯度清零
loss.backward() # 反向传播,自动计算出模型所有参数的 `.grad`
optimizer.step() # 根据 `.grad` 更新模型参数,用的更新策略是你定义的 optimizer
代码解释
outputs = model(images)
输入 images,通过模型计算出预测结果 outputs
- 对于分类问题:通常是 softmax 概率
- 对于二分类:通常是 sigmoid 概率
- 对于回归:直接是预测值
loss = criterion(outputs, labels)
- 计算 损失函数 loss
criterion是你定义的 loss 函数,比如:nn.CrossEntropyLoss()→ 多分类nn.BCELoss()→ 二分类nn.MSELoss()→ 回归
- 把
outputs和真值labels比较,算出 loss
(三)RMSprop 算法
(root mean square prop算法)
RMSprop 算法 和 动量梯度下降算法Momentum 非常相似,都可以减小摆动,加快逼近速度,允许使用更大的学习率
只是计算方法有一点点不一样,具体如下:
- 这个平方的操作是针对这一整个符号的
- 是为了防止分母趋近于0
代码实现
RMSprop 算法属于 步骤 4:训练过程(Training Loop),优化器(Optimizer)
optimizer = torch.optim.RMSprop(model.parameters(), lr=0.001, alpha=0.99, eps=1e-08)
| 参数 | 含义 | 推荐值 |
|---|---|---|
| lr | 学习率 α | 0.001 |
| alpha | 衰减系数 β(历史平方平均) | 0.9 ~ 0.99 |
| eps | 防止除零 | 1e-8 |
for epoch in range(num_epochs):
model.train()
for images, labels in train_loader:
outputs = model(images)
loss = criterion(outputs, labels)
optimizer.zero_grad()
loss.backward()
optimizer.step() # 自动用了 RMSprop 算法更新
(四)Adam优化算法
Adam优化算法就是将 Momentum 和 RMSprop 结合在一起
具体算法如下:
在第 t 次迭代中
- 其中 建议设置为0.9, 建议设置为 0.999
关于 Momentum,RMSprop 和 Adam 算法能够加快收敛速度的解释:
首先对于比较大的神经网络而言,由于W参数很多,所以不太可能会困在局部最优解,因为这要求很多参数同时为凹函数或者凸函数
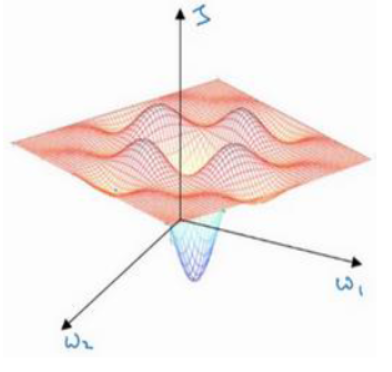
真正影响收敛速度的是下面这种鞍形。在鞍中点的斜率也是0
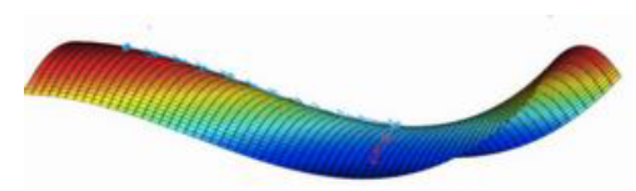
如果鞍的中间区段比较缓的话,这段时间的收敛就会很慢
而使用这些算法,由于‘动量’很大,所以可以快速地度过这些区域
Adam 的优点
- 学习率自动调整
- 收敛速度快
- 不需要太多调参
- 是深度学习中 最常用优化器之一
- 它内部会动态调整学习率(lr),自动平滑梯度(Momentum 一阶/二阶)
代码实现
Adam 优化算法 属于步骤 4:训练过程(Training Loop) → 优化器 Optimizer
optimizer = torch.optim.Adam(model.parameters(), lr=0.001, betas=(0.9, 0.999), eps=1e-8)
| 参数 | 含义 | 推荐值 |
|---|---|---|
| lr | 学习率 α | 0.001 |
| betas | β1,β2 | (0.9, 0.999) |
| eps | 防止除零 | 1e-8 |
for epoch in range(num_epochs):
model.train()
for images, labels in train_loader:
outputs = model(images)
loss = criterion(outputs, labels)
optimizer.zero_grad()
loss.backward()
optimizer.step() # 这里 step() 用的是 Adam 更新
(五)学习率衰减
(Learning Rate Decay)
由于学习率 是固定值,所以最后可能无法完全收敛到最优解,而是在最优解附近摆动。
这就需要我们让学习率不断降低,来收敛到最优解
所以对a的修改如下:
其中:
-
为初始学习率
-
epoch_num是当前是第几个epoch -
decayrate是衰减率,也是一个超参数
代码实现
学习率衰减(Learning Rate Decay)属于 步骤 4:训练过程(Training Loop)→ 优化器 + Scheduler 学习率调度器
这叫 Step Decay(epoch 级别调整)
用 torch.optim.lr_scheduler.LambdaLR 可以实现自定义 decay 规则:
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
# 定义 decay 函数
lr_lambda = lambda epoch: 1 / (1 + decay_rate * epoch)
scheduler = torch.optim.lr_scheduler.LambdaLR(optimizer, lr_lambda=lr_lambda)
在每个 epoch 结束后调用:
for epoch in range(num_epochs):
model.train()
for images, labels in train_loader:
outputs = model(images)
loss = criterion(outputs, labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
# 更新学习率
scheduler.step()
其他内置 decay 策略
| Scheduler | 策略 |
|---|---|
| StepLR | 每隔固定 epoch 乘以 γ |
| ExponentialLR | 每个 epoch ��按 γ 指数衰减 |
| ReduceLROnPlateau | 监控 val_loss,当不提升时衰减 lr |
| CosineAnnealingLR | 余弦退火 |